In Competition
Samwise Gamg-E
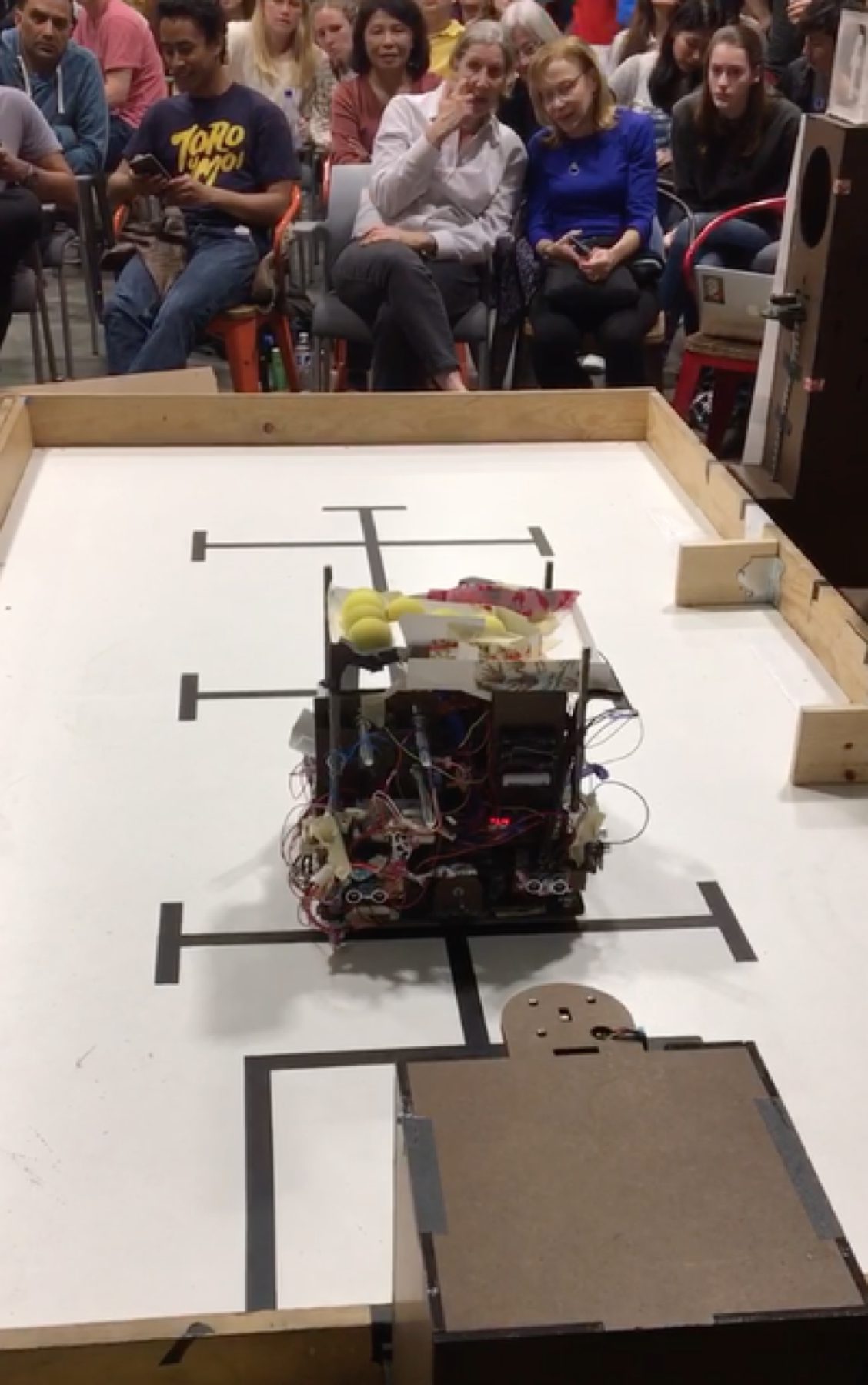
An autonomous robot that can navigate an arena using a variety of sensors, positioning and orienting itself to fire nerf balls through a 6" diameter hole roughly 8 feet away.
Duron and steel threaded stud frame. Various microcontroller, motor, navigation, hopper and firing system parts.
Laser-cut frame. Original design personally assembled, tested, and calibrated.
The class competition was performed in the spirit of the 2016 Presidential Election. Our competition in particular was meant to reflect the media war that took place in that election. As such, the website may refer to arenas as "media echo chambers," towers as "media sites," nerf balls as "alternative facts," and nerf ball blockers as "fact checkers." In this context, our project goal was to navigate our side’s echo chamber and fire as many alternative facts into the opposing side’s media sites as possible in order to "win" those media sites while fact checking our own towers to prevent the opposing team from firing alternative facts into our own sites. The side with the most sites won would be declared the winner after a little over two minutes. All robot contestants were required to fit within a 12" x 12" x 12" cube. Due to Stanford policy I cannot post the official class project description but you are welcome to ask me any questions.
Testing the firing mechanism to calibrate the flywheel height
Our first attempt at an orient function using ultrasonic sensors
First successful completion of all state transitions
Calibrating the firing system when mounted, in the arena
Testing all the incorporated subsystems
Testing different hopper designs to ensure better ball flow